Главная
Структурный и
кинематический анализ рычажного механизма
Задание.
1. Структурный анализ: изобразить структурную схему заданного рычажного
механизма, обозначить на ней звенья и кинематические пары (КП), определить
число звеньев, вид и класс КП, подсчитать число подвижностей и число избыточных
связей для плоского и пространственного механизма, провести структурный анализ
плоского механизма по Ассуру - вычертить первичный механизм
и структурные группы, определить в них число звеньев и КП, подвижность на
плоскости и в пространстве, для
пространственных групп удалить избыточные связи (снижением классов КП без
введения местных подвижностей).
2. Графоаналитическое исследование кинематики: для заданного положения
механизма вычертить в масштабе кинематическую схему и по ней решить графически
задачу о положениях; записать векторные уравнения для линейных скоростей и
алгебраические для угловых, построить в масштабе план скоростей и определить по
нему линейные скорости всех точек, обозначенных на механизме, и угловые
скорости всех звеньев; аналогичным путем решить задачу о ускорениях.
3. Аналитическое
исследование кинематики: для заданного механизма изобразить эквивалентную систему
векторных контуров и записать векторные уравнения их замкнутости; спроецировать
эти уравнения на оси координат и, оперируя с уравнениями проекций,
последовательно решить задачи о положениях, скоростях и ускорениях (как минимум
аналитическое решение провести только для выходного звена механизма). Полученные
аналитическим и графо-аналитическим методами
результаты кинематического анализа сводятся в таблицу. Если использовалась
компьютерные программы, то в таблице приводятся и результаты расчета на ЭВМ.
4. Для выходного
звена механизма построить цикловые диаграммы функции положения, скорости и
ускорения (или первой и второй передаточных функций) от обобщенной координаты φ1.
1. Структурный анализ
шестизвенного кулисного механизма
1.1. Теоретические
сведения
Структура любой технической системы определяется
функционально связанной совокупностью элементов и отношений между ними. При
этом для механизмов под элементами понимаются звенья, группы звеньев или
типовые механизмы, а под отношениями - подвижные (кинематические пары - КП) или
неподвижные соединения. Структура механизма на уровне звеньев, КП и структурных
групп отражается его структурной схемой. Структурная схема- графическое
изображение механизма, выполненное с использованием условных обозначений
рекомендованных ГОСТ (см. например ГОСТ 2.703-68) или принятых в специальной
литературе, содержащее информацию о числе и расположении элементов (звеньев,
групп), а также о виде и классе кинематических пар, соединяющих эти элементы.
Задачей структурного анализа является определение числа звеньев и структурных
групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров
и числа избыточных связей.
1.1.1.
Основные понятия структурного синтеза и анализа
Подвижность механизма - число независимых обобщенных координат однозначно
определяющее положение звеньев механизма на плоскости или в пространстве. Связь
- ограничение, наложенное на перемещение тела по данной координате. Избыточные
(пассивные) - такие связи в механизме, которые повторяют или дублируют
связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной
подвижности механизма. При этом расчетная подвижность механизма уменьшается, а
степень его статической неопределимости увеличивается. Иногда используется иное
определение: Избыточные связи - это связи, число которых в механизме
определяется разностью между суммарным числом связей, наложенных
кинематическими парами, и суммой степеней подвижности всех звеньев, местных
подвижностей и заданной (требуемой) подвижностью механизма в целом. Местные
подвижности - подвижности механизма, которые не оказывают влияния на его
функцию положения (и передаточные функции), а введены в механизм с другими
целями (например, подвижность ролика в кулачковом механизме обеспечивает замену
в высшей паре трения скольжения трением качения).
1.1.2.
Основные структурные формулы
Основные структурные формулы были составлены для
плоских механизмов Чебышевым и Грюблером, для пространственных - Сомовым и
Малышевым. Так как принципы заложенные в построение
всех этих формул одинаковы, то их можно записать в обобщенном виде:
![]()
где H -
число степеней подвижности твердого тела (соответственно при рассмотрении
механизма в пространстве H=6 , на
плоскости H=3); n = k - 1 - число подвижных звеньев в
механизме; k - общее
число звеньев механизма (включая и неподвижное звено - стойку); i - число подвижностей в КП; pi - число
кинематических пар с i
подвижностями.
Для расчета избыточных связей используется следующая зависимость:
![]()
где q -
число избыточных связей в механизме; W0
- заданная или требуемая подвижность механизма; Wм - число местных
подвижностей в механизме; W -
расчетная подвижность механизма.
1.2.
Пример структурного анализа механизма
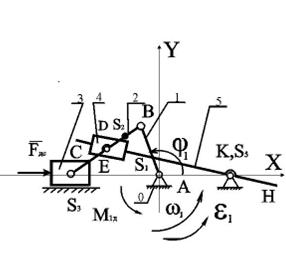
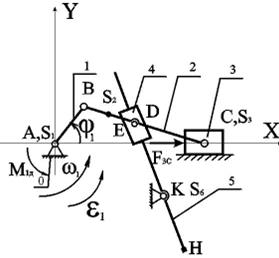
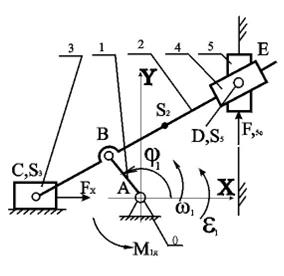
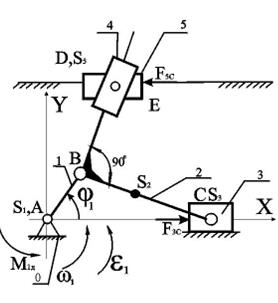
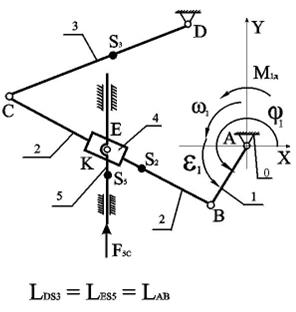
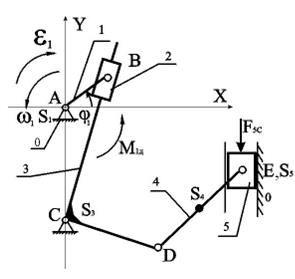
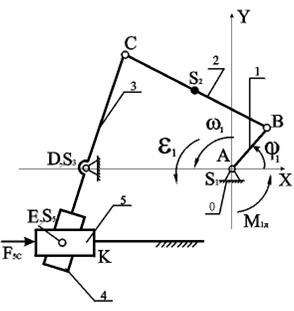
На рис.1.1 изображена структурная схема плоского
механизма. Структурная схема механизма в соответствии с принятыми условными
обозначениями изображает звенья механизма, их взаимное расположение, а также
подвижные между звеньями. На схеме звенья обозначены цифрами, кинематические
пары - заглавными латинскими буквами. Цифры в индексах обозначения КП указывают
относительную подвижность звеньев в паре, буквы - на вид пары, который
определяется видом относительного движения звеньев ( в -
вращательное, п - поступательное, ц - цилиндрическое, вп - обозначает высшую
пару в которой возможно относительное скольжение с одновременным
перекатыванием).
Рис.1.1. Структурная схема механизма
Проведем структурный анализ данного механизма. Общее
число звеньев механизма k=6, число
подвижных звеньев n=5 , число
кинематических пар pi=7 , из них
для плоского механизма одноподвижных p1=7 (вращательных
p1в=4,
поступательных p1п=3 ).
Число подвижностей механизма на плоскости Wпл=3∙5-2∙7=1=W0. Основная подвижность W0 определяет функцию механизма: преобразование
входного вращательного движения φ1 в поступательное S5. Если рассматривать механизм как
пространственный, то во-первых необходимо учесть, что с увеличением подвижности
звеньев с трех до шести изменяются и подвижности некоторых кинематических пар.
В нашем примере это низшая пара Q,
у которой подвижность увеличивается до двух. С учетом сказанного, подвижность
пространственного механизма равна:
Wпр=6∙5-(5∙6+4∙1)=30-34=-4
т.е. как пространственный данный механизм не имеет
подвижности, так как число связей в нем существенно (на пять) превышает
суммарную подвижность всех его звеньев. Однако от рассмотренного ранее плоского
варианта пространственный механизм ничем не отличается, то есть он имеет одну
основную подвижность. Связи, не изменяющие подвижности механизма, являются
избыточными. Для нашего механизма число избыточных связей: на плоскости
qпл=W0+WM-Wпл=1+0-1=0
в пространстве
qпр=W0+WM-Wпр=1+0-(-4)=5
Возникает вопрос: почему при
переходе от плоской к пространственной модели механизма возникают избыточные
связи? При анализе плоской модели
механизма мы исключаем из рассмотрения три координаты, а , следовательно, и
связи наложенные по этим координатам. В плоском механизме оси всех вращательных
пар параллельны, а оси поступательных - перпендикулярны оси КП входного звена
механизма. Для пространственного механизма выполнение этих условий не
обязательно. В нашем механизме 7 кинематических пар и, следовательно, 6 таких
условий. Если учесть, что при переходе от плоской модели к пространственной
общее число подвижностей в КП увеличилось на единицу, то получим пять
избыточных связей (т.к. 6-1 = 5). Известно, что избыточные связи возникают только
в замкнутых кинематических цепях. Поэтому при анализе структуры механизма важно
знать число независимых контуров, образованных его звеньями. Независимым
считается контур отличающийся от остальных хотя бы на одно звено. Расчет числа
контуров для механизма проводят по формуле Гохмана: K = pi - n = 7 - 5 = 2, где K - число независимых контуров в
механизме; pi -
число КП в механизме; n -
число подвижных звеньев в механизме.
1.3. Структурная
классификация механизмов по Ассуру Л.В.
Для решения задач синтеза и анализа сложных рычажных
механизмов профессором Петербургского университета Ассуром Л.В. была предложена
оригинальная структурная классификация. По этой классификации механизмы не
имеющие избыточных связей и местных подвижностей состоят из первичных механизмов
и структурных групп Ассура (см. рис.1.2).
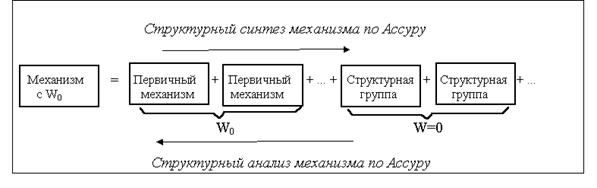
Рис.1.2
Под первичным
механизмом понимают механизм, состоящий из двух звеньев (одно из которых неподвижное)
образующих кинематическую пару с одной подвижностью Wпм=1. Примеры первичных механизмов даны на
рис. 1.3. Структурной группой Ассура (или группой нулевой подвижности)
называется кинематическая цепь, образованная только подвижными звеньями механизма,
подвижность которой (на плоскости и в пространстве) равна нулю (Wгр = 0). Конечные звенья групп
Ассура, входящие в две кинематические пары, из которых одна имеет свободный
элемент звена, называются поводками. Группы могут быть различной степени
сложности. Структурные группы Ассура делятся на классы в зависимости от числа
звеньев, образующих группу, числа поводков в группе, числа замкнутых контуров
внутри группы. В пределах класса (по Ассуру) группы подразделяются по числу
поводков на порядки (порядок группы равен числу ее поводков). Механизмы
классифицируются по степени сложности групп входящих в их состав. Класс и
порядок механизма определяется классом и порядком наиболее сложной из входящих
в него групп.
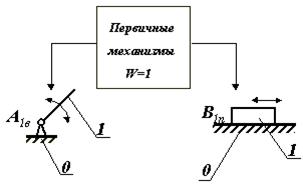
Рис.1.3
В плоских механизмах группами являются кинематические
цепи с низшими парами которые, удовлетворяют условию Wгр=3∙nгр-2∙p1=0. Решения этого уравнения в целых определяют
параметры групп Ассура. Эти параметры, а также классы простейших групп по
Ассуру и по Артоболевскому приведены в таблице 1.1.
Таблица 1.1
|
Класс
и порядок по Ассуру |
1
кл.2 пор. |
1
кл.3 пор. |
1
кл.4 пор |
|
Число
звеньев группы nгр |
2 |
4 |
6 |
|
Число
кинематических пар p1 |
3 |
6 |
9 |
|
Класс
и порядок по Артоболевскому |
2
кл.2 пор. |
3
кл.3 пор. |
4
кл.4 пор. |
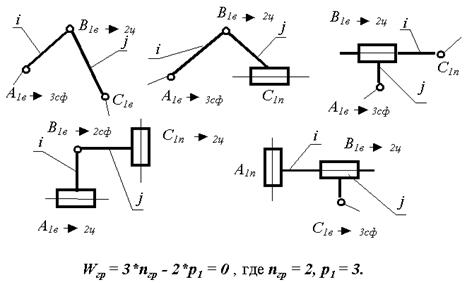
Рис.1.4.
Двухповодковые группы Асура (1-й класс 2-й порядок)
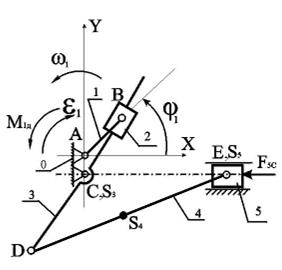
Проведем структурный анализ плоского механизма, схема
которого приведена на рис. 1.1, и представим его в виде совокупности первичного
механизма и структурных групп Ассура. Результаты структурного анализа
изображены на рис. 1.5. Механизм состоит из двух структурных двухповодковых
групп (группы, образованные звеньями 2-3 и 4-5) и первичного механизма
(включающего звенья 1-0). Если рассмотреть полученные структурные группы как
пространственные, то они не будут группами нулевой подвижности, так как имеют
избыточные связи.
1.4. Структурный
анализ механизмов по Ассуру
Рис.1.5
Преобразовать их в группы с нулевой подвижностью можно
уменьшая число связей в кинематических парах, так чтобы при этом не появлялись
местные подвижности. Необходимо также учитывать, что при переходе от плоского
представления механизма к пространственному, классы некоторых пар изменяются.
Так в нашем механизме одноподвижная поступательная пара ![]() изменяется
на двухподвижную цилиндрическую.
Для устранения избыточных связей в группах подвижности КП можно изменить так:
изменяется
на двухподвижную цилиндрическую.
Для устранения избыточных связей в группах подвижности КП можно изменить так:
группа звеньев 4-5 пара К → 1n → 2ц;
пара D → 1в → 2ц;
пара E → 1n → 2ц;
группа звеньев 2-3 пара B → 1в → 2ц;
пара С → 1в → 2сф,
где 2ц
- двухподвижная цилиндрическая КП, 2сф
- двухподвижная сферическая КП.
После таких изменений подвижностей в КП общая
подвижность механизма
Wпр=6∙5-(4∙6+5∙1)=30-29=1,
равна единице, а избыточные связи отсутствуют
qпр=W0+WM-Wпр=1+0-1=0.
Структурная схема механизма после устранения
избыточных связей с использованием условных обозначений КП изображена на рис.
1.6.
Рис.1.6
1.5. Примеры
структурного анализа механизмов
Пример 1.
1) 1 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 2, 3, 6 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
5, 7 –
коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
3) А5, С5 – кинематические пары
5-го класса низшие, поступательные.
D5, N5, B5, M5, W5, E5, K5, S5 – кинематические пары 5-го класса низшие,
поступательные.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 6,7; 2,5; 3,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 2, 3, 6 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
5, 7 –
коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
3) А5, С5 – кинематические пары
5-го класса низшие, поступательные.
D5, N5, B5, M5, W5, E5, K5, S5 – кинематические пары 5-го класса низшие,
поступательные.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 6,7; 2,5; 3,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 2, 3, 6 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
5, 7 –
коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
3) А5, С5 – кинематические пары
5-го класса низшие, поступательные.
D5, N5, B5, M5, W5, E5, K5, S5 – кинематические пары 5-го класса низшие,
поступательные.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 6,7; 2,5; 3,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 2, 3, 6 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
5, 7 –
коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
3) А5, С5 – кинематические пары
5-го класса низшие, поступательные.
D5, N5, B5, M5, W5, E5, K5, S5 – кинематические пары 5-го класса низшие,
поступательные.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 6,7; 2,5; 3,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
Пример 2.
1) 4 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
2) 1, 3, 5 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
3) A5, B5, C5, D5, N5, F5 –
кинематические пары 5-го класса низшие, вращательные.
4) W = 3n - 2p5 - p4 = 3∙5 - 2∙7 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 2,3; 2,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 4 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
2) 1, 3, 5 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
3) A5, B5, C5, D5, N5, F5 –
кинематические пары 5-го класса низшие, вращательные.
4) W = 3n - 2p5 - p4 = 3∙5 - 2∙7 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,3; 5,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 4 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
2) 1, 3, 5 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
3) A5, B5, C5, D5, N5, F5 –
кинематические пары 5-го класса низшие, вращательные.
4) W = 3n - 2p5 - p4 = 3∙5 - 2∙7 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,1; 5,4. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
Пример 3.
1) 3 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 1, 5, 8 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4 –
шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, B5, C5, K5, E5, V5, F5 – кинематические пары 5-го класса низшие,
вращательные.
D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Шестое звено является пассивной связью и его можно
удалить.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,3; 4,5; 7,8; 6,7. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 3 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 1, 5, 8 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4 – шатун
– звено, которое совершает сложное плоско-параллельное движение.
3) A5, B5, C5, K5, E5, V5, F5 – кинематические пары 5-го класса низшие,
вращательные.
D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Шестое звено является пассивной связью и его можно
удалить.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 4,5; 7,8; 6,7. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 3 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 1, 5, 8 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4 –
шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, B5, C5, K5, E5, V5, F5 – кинематические пары 5-го класса низшие,
вращательные.
D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Шестое звено является пассивной связью и его можно
удалить.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 7,8; 6,7. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 3 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 1, 5, 8 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4 –
шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, B5, C5, K5, E5, V5, F5 – кинематические пары 5-го класса низшие,
вращательные.
D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Шестое звено является пассивной связью и его можно
удалить.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,7; 4,5; 6,7. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
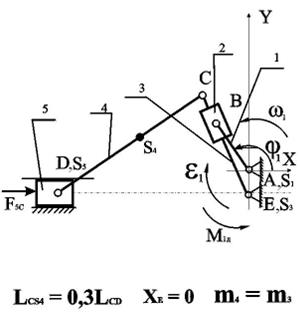
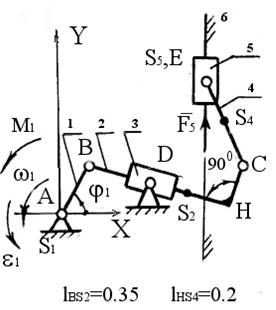
Пример 4.
1) 1– коромысло – звено, которое совершает неполный
оборот вокруг своей оси (качается).
2) 2 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
3 – ползун –
звено, которое совершает возвратно-поступательное движение.
3) A5, B5, C5, F5, H5 –
кинематические пары 5-го класса низшие, вращательные.
G5 –
кинематическая пара 5-го класса низшая, поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,3.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 1,4,5,6. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет.
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1– коромысло – звено, которое совершает неполный
оборот вокруг своей оси (качается).
2) 2 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
3 – ползун –
звено, которое совершает возвратно-поступательное движение.
3) A5, B5, C5, F5, H5 –
кинематические пары 5-го класса низшие, вращательные.
G5 –
кинематическая пара 5-го класса низшая, поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,3.
9) Группы Ассура 3-го класса нет.
10) Отсоединяем группу Ассура 4-го класса, состоящую
из звеньев 4, 5, 6, 7. Осталось ведущее звено и стойка.
11) Класс механизма 4-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 4-й.
1) 1– коромысло – звено, которое совершает неполный
оборот вокруг своей оси (качается).
2) 2 – шатун – звено, которое совершает сложное
плоско-параллельное движение.
3 – ползун –
звено, которое совершает возвратно-поступательное движение.
3) A5, B5, C5, F5, H5 –
кинематические пары 5-го класса низшие, вращательные.
G5 –
кинематическая пара 5-го класса низшая, поступательная.
4) W = 3n - 2p5 - p4 = 3∙7 - 2∙10 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2.
9) Группы Ассура 3-го класса нет.
10) Отсоединяем группу Ассура 4-го класса, состоящую
из звеньев 4, 5, 6, 7. Осталось ведущее звено и стойка.
11) Класс механизма 4-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 4-й.
Пример 5.
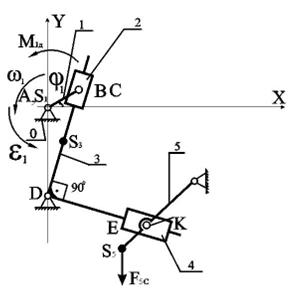
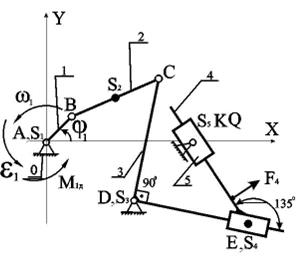
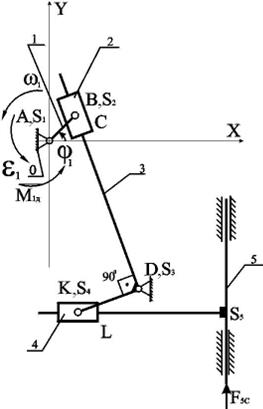
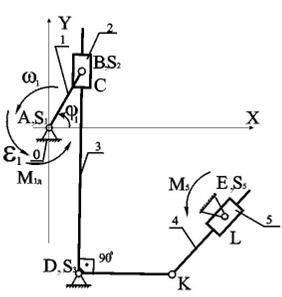
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9, 13 – коромысло – звено, которое
совершает неполный оборот вокруг своей оси (качается).
2, 4, 6, 10,
11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 –
кинематические пары 5-го класса низшие, вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 2,3; 4,5; 10,13; 11,12.
9) Отсоединяем группу Ассура 3-го класса, состоящую из
звеньев 6,7,8,9. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9, 13 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 –
кинематические пары 5-го класса низшие, вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 4,5; 10,13; 11,12.
9) Отсоединяем группу Ассура 3-го класса, состоящую из
звеньев 6, 7, 8, 9. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы Ассура
входящий в состав механизма 3-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 –
кинематические пары 5-го класса низшие, вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 10,13; 11,12.
9) Отсоединяем группу Ассура 3-го класса, состоящую из
звеньев 6, 7, 8, 9. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9,
13 – коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 – кинематические пары 5-го класса низшие,
вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 5,6; 7,8; 10,13; 11,12. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9, 13 – коромысло – звено, которое
совершает неполный оборот вокруг своей оси (качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 – кинематические пары 5-го класса низшие,
вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 5,6; 7,9; 10,13; 11,12. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9, 13 – коромысло – звено, которое
совершает неполный оборот вокруг своей оси (качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 – кинематические пары 5-го класса низшие,
вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 5,6; 7,9; 8,10; 11,13. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1, 12 – ползун – звено, которое совершает
возвратно-поступательное движение.
2) 3, 5, 8, 9,
13 – коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6,
10, 11 – шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, D5, K5, H5, N5, M5, F5, W5, G5, J5, I5, S5, V5, X5 – кинематические пары 5-го класса низшие,
вращательные.
U5, T5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,4; 5,6; 7,9; 8,10; 11,12. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
Пример 6.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 3,2; 3,5.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 6,7,9,8; 10,11,12,13. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11,
13 – коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 6,7,9,8; 10,11,12,13. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 6,7,9,8; 10,11,12,13. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 – ползун
– звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5; 3,6; 7,9.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 10,11,12,13. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5; 3,6; 7,9; 7,8.
9) Отсоединяем группу Ассура 3 класса, состоящую из
звеньев 10,11,12,13. Осталось ведущее звено и стойка.
10) Группы Ассура 4-го класса нет
11) Класс механизма 3-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 3-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13
– коромысло – звено, которое совершает неполный оборот вокруг своей оси
(качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5; 3,6; 7,9; 7,8; 10,12; 12,13. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
1) 1 – кривошип – звено, которое совершает
вращательное движение.
3, 5 –
ползун – звено, которое совершает возвратно-поступательное движение.
2) 8, 9, 11, 13 – коромысло – звено, которое совершает
неполный оборот вокруг своей оси (качается).
2, 4, 6, 10
– шатун – звено, которое совершает сложное плоско-параллельное движение.
3) A5, E5, R5, C5, K5, Z5, N5, F5, W5, G5, J5, I5, S5, V5, F5, U5, T5 –
кинематические пары 5-го класса низшие, вращательные.
L5, D5 – кинематическая пара 5-го класса низшая,
поступательная.
4) W = 3n - 2p5 - p4 = 3∙13 - 2∙19 = 1
5) Лишних степеней свободы нет.
6) Пассивных связей нет.
7) Высших кинематических пар нет.
8) Отсоединяем группу Ассура 2 класса, состоящую из
звеньев 1,2; 3,5; 3,6; 7,9; 7,8; 10,12; 11,12. Осталось ведущее звено и стойка.
9) Группы Ассура 3-го класса нет
10) Группы Ассура 4-го класса нет
11) Класс механизма 2-й, т.к. наивысший класс группы
Ассура входящий в состав механизма 2-й.
2. Кинематический анализ
шестизвенного кулисного механизма методом планов положений, скоростей и
ускорений
В данном примере приводится кинематический
шестизвенного кулисного механизма. (рис. 2.1). Решение векторных уравнений
скоростей и ускорений проводится графическим методом, часть неизвестных
определяется по уравнениям кинематики плоского движения аналитически. Таким
образом, для решения уравнений кинематики используется комбинированный
графо-аналитический метод.
2.1. Исходные данные
для кинематического расчета механизма
Угловая координата кривошипа φ1= 150°.
Линейные размеры звеньев механизма lAB=0,117 м, lCD=0,728
м,
lCS3 = 0,364
м, xC=0 м, yC
=-0.38 м, yE=0,71 м.
В заданном положении механизма:
угловая скорость ω1= 6.44 рад/с;
угловое ускорение ε1= -1,02 рад/с2.
2.2. Построение
планов положений, скоростей и ускорений
2.2.1. Построение
плана положений
Планом положений механизма называется векторная
диаграмма, на которой в масштабе изображены векторы звеньев механизма. При
построении плана положений звенья изображаются прямыми линиями. Кинематические
пары на плане не изображаются. С помощью плана положений графически решается
задача о положении звеньев, определяются неизвестные линейные и угловые
координаты. При выполнении домашнего задания построение плана положений
заменяют вычерчиванием кинематической схемы механизма в заданном положении.
Кинематической схемой механизма называется его структурная схема, выполненная в
масштабе. При вычерчивании кинематической схемы используются условные
обозначения звеньев и кинематических пар рекомендуемые ГОСТ 2.770-80.
Кинематическая схема анализируемого механизма приведена на рис. 2.1.
2.2.2. Построение
плана скоростей
Линейную скорость точки B звена 1 определяем по
формуле вращательного движения
![]()
На плане скорость ![]() изображается
отрезком pvb. Зададимся величиной этого отрезка pvb= 76 мм, и определим
масштаб плана скоростей
изображается
отрезком pvb. Зададимся величиной этого отрезка pvb= 76 мм, и определим
масштаб плана скоростей ![]()
Для определения скорости точки B звена 3 составим векторное уравнение
сложного движения
![]()
из графического решения этого уравнения находим
значения скорости
![]()
![]()
Скорость точки D и центра масс звена 3 определяем пропорциональным делением
отрезков плана скоростей:
![]()
![]()
![]()
![]()
Угловую скорость звена 3 находим по следующей формуле:
![]()
Для определения скорости точки Е звена 5 составим векторное
уравнение сложного движения
![]()
Рис. 2.1. Кинематическая
схема механизма
из графического решения этого уравнения находим
значения скорости
![]()
![]()
План скоростей приведен на рис. 2.2.
2.2.3.
Построение плана ускорений
Ускорение точки В звена 1 определяем по формулам вращательного движения
![]()
где ![]() - нормальная
составляющая ускорения,
- нормальная
составляющая ускорения,
![]()
![]() - тангенциальная составляющая,
- тангенциальная составляющая,
![]()
Рис.2.2.
План скоростей
Задаемся величиной отрезка ![]() мм, изображающего на плане ускорений нормальную составляющую,
и определяем масштаб плана ускорений
мм, изображающего на плане ускорений нормальную составляющую,
и определяем масштаб плана ускорений
![]()
Ускорение точки B
звена 3 определяется совместным решением векторных уравнений сложного движения
точки B3 относительно
точки B1
![]()
где ![]() - ускорение Кариолиса точки B3 в относительном движении относительно точки B1,
- ускорение Кариолиса точки B3 в относительном движении относительно точки B1,
![]()
и вращательного движения звена 3,
![]()
где ![]() - нормальная
составляющая ускорения,
- нормальная
составляющая ускорения,
![]()
![]() - тангенциальная составляющая.
- тангенциальная составляющая.
Тангенциальные составляющие ускорений найдем из плана
ускорений
![]()
![]()
Ускорение точки D
и центра масс звена 3 определим методом пропорционального деления отрезков
плана ускорений:
![]()
![]()
![]()
![]()
По величине тангенциальной составляющей ![]() находим угловое
ускорение звена 3
находим угловое
ускорение звена 3
![]()
Ускорение точки
E звена 5 определяется из решения векторного уравнения сложного движения
точки Е относительно точки D
![]()
Из плана ускорений:
![]()
![]()
План ускорений показан на рис. 2.3.
Рис.2.3
Варианты заданий
|
Вариант №1 |
|||||||||||||
|
|
m1 |
12 |
|||||||||||
|
m2 |
25 |
||||||||||||
|
m3 |
35 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
16 |
||||||||||||
|
I2S |
1,0 |
||||||||||||
|
I5C |
0,6 |
||||||||||||
|
F3C |
4000 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
10 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,46 |
||||||||||||
|
lBD |
0,23 |
||||||||||||
|
lEH |
0,3 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XE |
0,45 |
||||||||||||
|
YK |
0 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №2 |
|||||||||||||
|
|
m1 |
12 |
|||||||||||
|
m2 |
25 |
||||||||||||
|
m3 |
35 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
16 |
||||||||||||
|
I2S |
1,0 |
||||||||||||
|
I5C |
0,6 |
||||||||||||
|
F3C |
4000 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
10 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,46 |
||||||||||||
|
lBD |
0,23 |
||||||||||||
|
lEH |
0,2 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XE |
0,3 |
||||||||||||
|
YK |
-0,25 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №3 |
|||||||||||||
|
|
m1 |
15 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m5 |
60 |
||||||||||||
|
I1S |
15 |
||||||||||||
|
I2S |
2,5 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
12 |
||||||||||||
|
𝜀1 |
10 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XE |
0,3 |
||||||||||||
|
YC |
0 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №4 |
|||||||||||||
|
|
m1 |
15 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m5 |
60 |
||||||||||||
|
I1S |
15 |
||||||||||||
|
I2S |
2,5 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
15 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
YE |
0,32 |
||||||||||||
|
YC |
0 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №5 |
|||||||||||||
|
|
m1 |
26 |
|||||||||||
|
m2 |
16 |
||||||||||||
|
m3 |
35 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
17 |
||||||||||||
|
I2S |
1,8 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
16 |
||||||||||||
|
𝜀1 |
12 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,45 |
||||||||||||
|
lBS2 |
0,32 |
||||||||||||
|
XC |
0 |
||||||||||||
|
YE |
0,8 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №6 |
|||||||||||||
|
|
m1 |
26 |
|||||||||||
|
m2 |
16 |
||||||||||||
|
m3 |
35 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
17 |
||||||||||||
|
I2S |
1,8 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
14 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,45 |
||||||||||||
|
lBS2 |
0,3 |
||||||||||||
|
XC |
0 |
||||||||||||
|
YE |
-0,5 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №7 |
|||||||||||||
|
|
m1 |
60 |
|||||||||||
|
m2 |
35 |
||||||||||||
|
m3 |
60 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I2S |
2 |
||||||||||||
|
I3S |
6,5 |
||||||||||||
|
F5C |
6000 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
30 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lCD |
0,3 |
||||||||||||
|
lBS2 |
0,18 |
||||||||||||
|
XD |
-0,35 |
||||||||||||
|
YD |
-0,27 |
||||||||||||
|
YE |
0,2 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №8 |
|||||||||||||
|
|
m1 |
60 |
|||||||||||
|
m2 |
35 |
||||||||||||
|
m3 |
60 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I2S |
2 |
||||||||||||
|
I3S |
6,5 |
||||||||||||
|
F5C |
6000 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
30 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lCD |
0,3 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XD |
-0,1 |
||||||||||||
|
YD |
0,3 |
||||||||||||
|
XK |
-0,15 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №9 |
|||||||||||||
|
|
m1 |
22 |
|||||||||||
|
m2 |
20 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
25 |
||||||||||||
|
I2S |
1,0 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
10 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,2 |
||||||||||||
|
XE |
-0,5 |
||||||||||||
|
Yc |
0 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||

|
Вариант №10 |
|||||||||||||
|
|
m1 |
22 |
|||||||||||
|
m2 |
20 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
25 |
||||||||||||
|
I2S |
1,0 |
||||||||||||
|
F3C |
6000 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
ω1 |
14 |
||||||||||||
|
𝜀1 |
12 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,2 |
||||||||||||
|
|
30° |
||||||||||||
|
Yc |
0 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №11 |
|||||||||||||
|
|
m1 |
2 |
|||||||||||
|
m3 |
5 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
0,2 |
||||||||||||
|
I3S |
0,3 |
||||||||||||
|
F5C |
2000 |
||||||||||||
|
ω1 |
16 |
||||||||||||
|
𝜀1 |
7 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lCD |
0,65 |
||||||||||||
|
lCS3 |
0,3 |
||||||||||||
|
Xc |
0 |
||||||||||||
|
Yc |
-0,5 |
||||||||||||
|
YE |
0,2 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №12 |
|||||||||||||
|
|
m1 |
2 |
|||||||||||
|
m3 |
5 |
||||||||||||
|
m5 |
30 |
||||||||||||
|
I1S |
0,2 |
||||||||||||
|
I3S |
0,3 |
||||||||||||
|
M1D |
120 |
||||||||||||
|
ω1 |
16 |
||||||||||||
|
𝜀1 |
7 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lCD |
0,25 |
||||||||||||
|
lCS3 |
0,1 |
||||||||||||
|
Xc |
-0,15 |
||||||||||||
|
Yc |
-0,2 |
||||||||||||
|
XE |
0,35 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №13 |
|||||||||||||
|
|
m1 |
12 |
|||||||||||
|
m3 |
15 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I3S |
0,4 |
||||||||||||
|
I4S |
0,3 |
||||||||||||
|
M1D |
400 |
||||||||||||
|
ω1 |
18 |
||||||||||||
|
𝜀1 |
14 |
||||||||||||
|
lAB |
0,12 |
||||||||||||
|
lCD |
0,24 |
||||||||||||
|
lDE |
0,2 |
||||||||||||
|
lDS4 |
0,15 |
||||||||||||
|
Xc |
0 |
||||||||||||
|
Yc |
-0,24 |
||||||||||||
|
XE |
0,40 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №14 |
|||||||||||||
|
|
m1 |
12 |
|||||||||||
|
m3 |
15 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I3S |
0,4 |
||||||||||||
|
I4S |
0,3 |
||||||||||||
|
M1D |
400 |
||||||||||||
|
ω1 |
18 |
||||||||||||
|
𝜀1 |
14 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
lCD |
0,2 |
||||||||||||
|
lDE |
0,48 |
||||||||||||
|
lDS4 |
0,24 |
||||||||||||
|
Xc |
0 |
||||||||||||
|
Yc |
-0,06 |
||||||||||||
|
XE |
-0,06 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №15 |
|||||||||||||
|
|
m2 |
6 |
|||||||||||
|
m3 |
15 |
||||||||||||
|
m5 |
16 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
5 |
||||||||||||
|
I1S |
1 |
||||||||||||
|
I3S |
0,6 |
||||||||||||
|
I4S |
0,2 |
||||||||||||
|
M1D |
270 |
||||||||||||
|
lCD |
0,5 |
||||||||||||
|
lCE |
0,35 |
||||||||||||
|
YE |
-0,05 |
||||||||||||
|
YD |
-0,05 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №16 |
|||||||||||||
|
|
m2 |
6 |
|||||||||||
|
m3 |
15 |
||||||||||||
|
m5 |
16 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
5 |
||||||||||||
|
I1S |
1 |
||||||||||||
|
I2S |
0,4 |
||||||||||||
|
I5S |
1 |
||||||||||||
|
F3C |
300 |
||||||||||||
|
lBC |
0,6 |
||||||||||||
|
lDK |
0,8 |
||||||||||||
|
XD |
-0,4 |
||||||||||||
|
YD |
-0,4 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №17 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
24 |
||||||||||||
|
m3 |
22 |
||||||||||||
|
m5 |
25 |
||||||||||||
|
I1S |
1,2 |
||||||||||||
|
I2S |
0,5 |
||||||||||||
|
I3C |
0,3 |
||||||||||||
|
F5C |
5000 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
30 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lCD |
0,2 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XD |
-0,3 |
||||||||||||
|
YD |
0 |
||||||||||||
|
YE |
-0,2 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №18 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
24 |
||||||||||||
|
m3 |
22 |
||||||||||||
|
m5 |
25 |
||||||||||||
|
I1S |
1,2 |
||||||||||||
|
I2S |
0,5 |
||||||||||||
|
I3C |
0,3 |
||||||||||||
|
F5C |
5000 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
30 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lCD |
0,2 |
||||||||||||
|
lBS2 |
0,1 |
||||||||||||
|
XD |
-0,3 |
||||||||||||
|
YD |
-0,15 |
||||||||||||
|
YE |
0,3 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №19 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
18 |
||||||||||||
|
m4 |
15 |
||||||||||||
|
m5 |
40 |
||||||||||||
|
I1S |
1,6 |
||||||||||||
|
I2S |
1,2 |
||||||||||||
|
I4S |
0,9 |
||||||||||||
|
F5C |
400 |
||||||||||||
|
ω1 |
12 |
||||||||||||
|
𝜀1 |
7 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,5 |
||||||||||||
|
lCE |
0,4 |
||||||||||||
|
lBS2 |
0,25 |
||||||||||||
|
lCS4 |
0,2 |
||||||||||||
|
XD |
-0,2 |
||||||||||||
|
YD |
-0,1 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №20 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
18 |
||||||||||||
|
m4 |
15 |
||||||||||||
|
m5 |
40 |
||||||||||||
|
I1S |
1,6 |
||||||||||||
|
I2S |
1,2 |
||||||||||||
|
I4S |
0,9 |
||||||||||||
|
F5C |
400 |
||||||||||||
|
ω1 |
12 |
||||||||||||
|
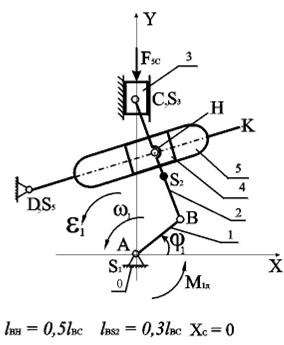
𝜀1 |
7 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBH |
0,46 |
||||||||||||
|
lCE |
0,3 |
||||||||||||
|
lCH |
0,15 |
||||||||||||
|
XE |
0,38 |
||||||||||||
|
XD |
0,3 |
||||||||||||
|
YD |
0,1 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №21 |
|||||||||||||
|
|
m1 |
30 |
|||||||||||
|
m2 |
50 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,45 |
||||||||||||
|
lCD |
0,3 |
||||||||||||
|
I1S |
0,6 |
||||||||||||
|
I2S |
1,2 |
||||||||||||
|
I3S |
0,8 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
8 |
||||||||||||
|
lBH |
0,3 |
||||||||||||
|
lBS2 |
0,2 |
||||||||||||
|
lHS4 |
0,25 |
||||||||||||
|
XD |
0,55 |
||||||||||||
|
XE |
0,35 |
||||||||||||
|
F4C |
250 |
||||||||||||
|
M3C |
500 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №22 |
|||||||||||||
|
|
m1 |
30 |
|||||||||||
|
m2 |
50 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,45 |
||||||||||||
|
lCD |
0,3 |
||||||||||||
|
I1S |
0,6 |
||||||||||||
|
I2S |
1,2 |
||||||||||||
|
I3S |
0,8 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
8 |
||||||||||||
|
lBS2 |
0,2 |
||||||||||||
|
lCS3 |
0,12 |
||||||||||||
|
lES5 |
0,1 |
||||||||||||
|
XD |
-0,5 |
||||||||||||
|
YD |
-0,4 |
||||||||||||
|
YK |
-0,2 |
||||||||||||
|
F5C |
500 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №23 |
|||||||||||||
|
|
m1 |
10 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
60 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
lBC |
0,8 |
||||||||||||
|
lBS2 |
0,36 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I2S |
8 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
15 |
||||||||||||
|
lBH |
0,6 |
||||||||||||
|
lHS4 |
0,4 |
||||||||||||
|
XE |
0,26 |
||||||||||||
|
I4S |
10 |
||||||||||||
|
M1D |
250 |
||||||||||||
|
m4 |
30 |
||||||||||||
|
F4C |
500 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №24 |
|||||||||||||
|
|
m1 |
10 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
60 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
lBC |
0,8 |
||||||||||||
|
lBS2 |
0,36 |
||||||||||||
|
I1S |
5 |
||||||||||||
|
I2S |
8 |
||||||||||||
|
ω1 |
20 |
||||||||||||
|
𝜀1 |
15 |
||||||||||||
|
lBD |
0,22 |
||||||||||||
|
lEH |
0,4 |
||||||||||||
|
XE |
0,55 |
||||||||||||
|
YE |
0,4 |
||||||||||||
|
I5S |
2,0 |
||||||||||||
|
m5 |
8,0 |
||||||||||||
|
F5C |
1000 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №25 |
|||||||||||||
|
|
m1 |
10 |
|||||||||||
|
m2 |
25 |
||||||||||||
|
m3 |
40 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
lCD |
0,4 |
||||||||||||
|
𝛼 |
30 |
||||||||||||
|
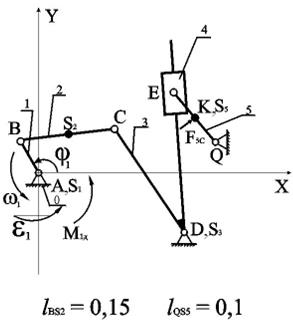
lEQ |
0,2 |
||||||||||||
|
lQS5 |
0,1 |
||||||||||||
|
XD |
0,5 |
||||||||||||
|
YD |
-0,2 |
||||||||||||
|
XQ |
0,6 |
||||||||||||
|
YQ |
0,1 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
30 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
I1S |
10 |
||||||||||||
|
I2S |
0,5 |
||||||||||||
|
I3S |
2 |
||||||||||||
|
I5S |
5 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №26 |
|||||||||||||
|
|
m1 |
15 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m5 |
40 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lBS2 |
0,2 |
||||||||||||
|
lKQ |
0,12 |
||||||||||||
|
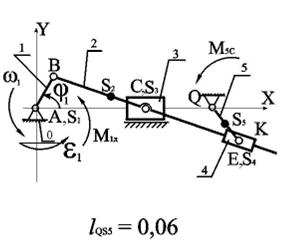
lQS5 |
0,06 |
||||||||||||
|
I1S |
25 |
||||||||||||
|
I2S |
0,5 |
||||||||||||
|
I5S |
2 |
||||||||||||
|
XQ |
0,6 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
20 |
||||||||||||
|
M5C |
500 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №27 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
50 |
||||||||||||
|
m3 |
30 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,4 |
||||||||||||
|
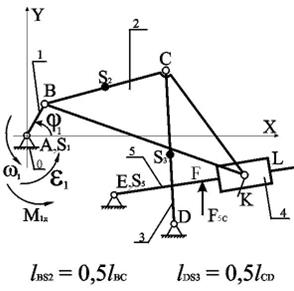
lBS2 |
0,2 |
||||||||||||
|
lCD |
0,5 |
||||||||||||
|
lBK |
0,7 |
||||||||||||
|
lDS3 |
0,25 |
||||||||||||
|
XE |
0,3 |
||||||||||||
|
YE |
-0,2 |
||||||||||||
|
XD |
0,5 |
||||||||||||
|
YD |
-0,3 |
||||||||||||
|
XF |
0,35 |
||||||||||||
|
I1S |
30 |
||||||||||||
|
I2S |
5 |
||||||||||||
|
I3S |
5 |
||||||||||||
|
I4S |
2 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
15 |
||||||||||||
|
F5C |
5000 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №28 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
15 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
lAB |
0,15 |
||||||||||||
|
lBC |
0,5 |
||||||||||||
|
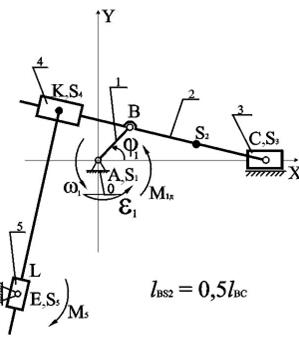
lBS2 |
0,25 |
||||||||||||
|
XE |
-0,3 |
||||||||||||
|
YE |
-0,5 |
||||||||||||
|
I1S |
30 |
||||||||||||
|
I2S |
2 |
||||||||||||
|
I4S |
5 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
10 |
||||||||||||
|
M5 |
400 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №29 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
m5 |
0 |
||||||||||||
|
IS1 |
10 |
||||||||||||
|
IS2 |
0,5 |
||||||||||||
|
IS3 |
20 |
||||||||||||
|
IS4 |
10 |
||||||||||||
|
IS5 |
0 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lQK |
0,2 |
||||||||||||
|
lDS3 |
0,15 |
||||||||||||
|
lQS5 |
0,3 |
||||||||||||
|
XQ |
0,5 |
||||||||||||
|
YQ |
0,25 |
||||||||||||
|
YD |
0,3 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
20 |
||||||||||||
|
F5C |
500 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №30 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m2 |
30 |
||||||||||||
|
m3 |
50 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
m5 |
0 |
||||||||||||
|
IS1 |
10 |
||||||||||||
|
IS2 |
0,5 |
||||||||||||
|
IS3 |
20 |
||||||||||||
|
IS4 |
10 |
||||||||||||
|
IS5 |
0 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lBC |
0,3 |
||||||||||||
|
lCD |
0,4 |
||||||||||||
|
lEM |
0,1 |
||||||||||||
|
lBS2 |
0,15 |
||||||||||||
|
XK |
0,5 |
||||||||||||
|
XD |
0,3 |
||||||||||||
|
YD |
-0,2 |
||||||||||||
|
ω1 |
15 |
||||||||||||
|
𝜀1 |
20 |
||||||||||||
|
F5C |
1000 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №31 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m3 |
30 |
||||||||||||
|
m5 |
50 |
||||||||||||
|
lAB |
0,1 |
||||||||||||
|
lDK |
0,2 |
||||||||||||
|
XD |
0,6 |
||||||||||||
|
YD |
-0,5 |
||||||||||||
|
XS3 |
0,6 |
||||||||||||
|
I1S |
20 |
||||||||||||
|
I3S |
5 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
15 |
||||||||||||
|
F5C |
3000 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
|
Вариант №32 |
|||||||||||||
|
|
m1 |
20 |
|||||||||||
|
m3 |
50 |
||||||||||||
|
m4 |
20 |
||||||||||||
|
lAB |
0,2 |
||||||||||||
|
lDK |
0,3 |
||||||||||||
|
XE |
0,6 |
||||||||||||
|
YE |
-0,3 |
||||||||||||
|
XD |
0,1 |
||||||||||||
|
YD |
-0,5 |
||||||||||||
|
IS1 |
30 |
||||||||||||
|
IS3 |
5 |
||||||||||||
|
IS5 |
3 |
||||||||||||
|
ω1 |
10 |
||||||||||||
|
𝜀1 |
20 |
||||||||||||
|
M5C |
400 |
||||||||||||
|
Вариант |
|||||||||||||
|
|||||||||||||
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика