Главная
Лекция 11. Основы теории высшей кинематической пары.
§ 1. Введение в теорию высшей пары, основные понятия и
определения.
Два твердых тела (звена), соприкасающиеся
своими поверхностями и имеющие возможность двигаться относительно друг друга,
образуют кинематическую пару. Кинематическая пара допускает не любое
движение звеньев относительно друг друга, а только такое движение, которое
согласуется с характером соприкосновения и с формой соприкасающихся
поверхностей.
Если звенья, образующие КП, в силу характера
их соприкосновения, могут совершать только простейшие движения относительно
друг друга ( вращательное, прямолинейное поступательное
или, в общем случае, винтовое ), то пара является низшей. Низшая пара
- пара, в которой требуемое относительное движение звеньев обеспечивается соприкасанием ее элементов по поверхности ( фактическое соприкасание звеньев
в низшей паре возможно как по поверхности, так и по линиям и точкам ). В таких
парах движение одного звена относительно другого представляет собой чистое
скольжение, причем может иметь место поверхностный контакт - соприкасание звеньев по плоскости, цилиндрической или
винтовой поверхности. Такая поверхность контакта может двигаться, “как бы
оставаясь в самой себе”.
Более сложные относительные движения можно
реализовать в парах, характер соприкасания звеньев в
которых допускает не только относительное скольжение, но и перекатывание. Такие
пары называются высшими. Высшая пара - пара, в которой требуемое
относительное движение звеньев может быть получено только соприкасанием
звеньев по линиям или в точках. В высшей паре поверхностный
контакт невозможен, так как он исключает возможность перекатывания тел. Если
контакт в высшей КП происходит по линии, то она называется мгновенной
контактной линией. Эта линия может быть прямой или кривой, при движении
соприкасающихся тел она не только меняет свое положение по отношению к звеньям
и к неподвижному пространству, но может менять и свою форму. Двигаясь
относительно каждого из соприкасающихся звеньев, эта линия как бы “покрывает”,
описывает или формирует его поверхность. То есть поверхность каждого из звеньев
пары можно рассматривать как геометрическое место мгновенных контактных линий в
системе координат, связанной со звеном. В неподвижном пространстве эти линии
описывают поверхность зацепления - геометрическое место мгновенных контактных
линий в неподвижной системе координат. Очевидно, что мгновенная контактная
линия - линия пересечения поверхности зацепления с любой из двух
соприкасающихся поверхностей. При точечном контакте, контактная точка в
системах координат связанных со звеньями описывает некоторую контактную линию
на контактирующей поверхности, в неподвижной системе координат - линию
зацепления.
Как следует из вышеизложенного, характер
относительного движения звеньев КП и геометрия их контактирующих поверхностей
находятся в тесной взаимосвязи. Изучение геометрии контактирующих поверхностей
в связи с их относительным движением составляет предмет раздела прикладной
механики, который называется теорией зацепления.
§ 2. Механизмы с высшими кинематическими парами и их
классификация.
К механизмам с высшими КП относятся любые механизмы в состав которых входит хотя бы одна высшая пара.
Простейший типовой механизм с высшей парой состоит из двух подвижных звеньев,
образующих между собой высшую кинематическую пару, а со стойкой низшие ( вращательные или поступательные ) пары. К простейшим
механизмам с высшей парой относятся :
- фрикционные передачи (рис. 11.3),
- зубчатые передачи (рис. 11.2),
- кулачковые механизмы (рис. 11.1),
- поводковые механизмы (в том числе и мальтийские - рис. 11.4).
Структурные схемы простейших механизмов
с высшими КП.
|
|
Фрикционными механизмами или передачами
сцепления называются механизмы с высшей парой в
которых передача движения в высшей паре осуществляется за счет сил сцепления
или трения в зоне контакта. Кулачковым механизмом называется механизм с высшей
парой, ведущее звено которого выполнено в форме замкнутой криволинейной
поверхности и называется кулачком (или кулаком). Зубчатыми механизмами
называются механизмы звенья которых снабжены зубьями (зубчатый механизм можно
определить как многократный кулачковый, рассматривая зацепление каждой пары
зубьев, как зацепление двух кулачков) . Рабочие
поверхности зубьев должны быть выполнены так, чтобы обеспечивать передачу и
преобразование движения по заданному закону за счет их зацепления . Условия,
которым должны удовлетворять рабочие поверхности высших пар, формулируются в
разделе теории механизмов - теории зацепления или теории высшей пары.
§ 3. Основы теории высшей кинематической пары.
Основная теорема зацепления.
Понятие о полюсе и центроидах.
Рассмотрим два твердых тела i и j,
которые совершают друг по отношению к другу плоское движение. Свяжем с телом i систему координат 0i xiyi , а с телом j систему координат 0jxjyj
. Плоское движение тела i
относительно тела j в
рассматриваемый момент эквивалентно вращению вокруг мгновенного центра
скоростей или полюса P. Тогда геометрическое место полюсов
относительного вращения в системе координат 0ixiyi
называется подвижной Цi,
а в системе координат 0jxjyj
неподвижной Цjцентроидой. В
процессе рассматриваемого движения цетроиды
контактируют друг с другом в полюсах относительного вращения и поэтому
перекатываются друг по другу без скольжения, т.е.
|
|
VPi = VPj ;
VPiPj = 0 ;
тогда дуга Swi
равна дуге Swj
.
Полюс зацепления - мгновенный центр относительного вращения звеньев,
образующих кинематическую пару.
Центроида (полоида) - геометрическое место центров (полюсов)
относительного вращения в системах координат, связанных со звеньями.
Передаточное отношение для тел совершающих вращательное движение.
Рассмотрим два тела 1 и 2,
совершающих вращательное движение соответственно вокруг центров 01
и 02 с угловыми скоростями w 1 и w 2 (рис. 11.6). Причем нам неизвестно связаны эти тела между собой или нет.
Как отмечено выше, полюс относительного вращения этих тел будет лежать в такой
общей точке этих тел , где вектора скоростей как
первого, так и второго тела будут равны. Для скоростей любой точки первого тела
VA = w1*lA01 , для любой точки второго - VВ
= w 2*lВ02 . Равенство векторов скоростей по направлению для тел,
совершающих вращательное движение, возможно только на линии соединяющей центры
вращения тел. Поэтому полюс относительного вращения должен лежать на этой линии. Для определения положения полюса на линии центров
составим следующее уравнение
|
|
|
Рис 11.6 |
Таким образом, полюс относительного
вращения звеньев лежит на линии центров и делит ее на отрезки обратно
пропорциональные угловым скоростям.
Теорема Виллиса. Передаточное отношение между звеньями
совершающими вращательное движение прямопропорционально
отношению угловых скоростей и обратно пропорционально отношению расстояний от
центров вращения до полюса.
Знак перед отношением показывает внешним
(знак +, зацепление внутреннее) или внутренним (знак - ,
зацепление внешнее) образом делит полюс линию центров на отрезки rw1
= l 01P и rw2 = l 02P . Данная формула получена из
рассмотрения вращательного движения двух тел, при этом тела могут быть и не
связаны между собой.
Воспользуемся методом обращенного движения и
рассмотрим движение нашей системы относительно звена 1. Для этого к скоростям
всех звеньев механизма добавим - w 1. Тогда скорости звеньев изменятся следующим образом:
|
Движение механизма: |
Звено 1 |
Звено 2 |
Звено 0 |
|
исходное |
w 1 |
w 2 |
w 0 =
0 |
|
относительно звена 1 |
w 1 -
w1 = 0 |
w 21
= w2 - w 1 |
w 1 =
- w01 |
Скорость любой точки звена 2 в относительном
движении будет равно его угловой скорости в этом движении умноженной на расстояние
от этой точки до полюса относительного вращения, т. е.
![]()
Перейдем к рассмотрению двух тел 1
и 2 , совершающих вращательное движение, соответственно вокруг
центров 01и 02 с угловыми
скоростями w1 и
w2 , и
образующих между собой высшую кинематическую пару К
(рис. 11.7).
|
|
Условием существования высшей кинематической
пары является условие неразрывности контакта звеньев, которое заключается в том,
что проекции скоростей звеньев в точке контакта на контактную нормаль к
профилям должны быть равны
![]()
т.е. скалярное произведение вектора
относительной скорости в точке контакта на орт нормали равно нулю. Это условие
обеспечивается, если скорость относительного движения контактных точек лежит на
касательной ( в пространстве в касательной плоскости
). При выполнении этого условия профили не отстают друг от друга (нарушение
контакта приведет к исчезновению пары ), и не
внедряются друг в друга
( что при принятом допущении о абсолютно
жестких звеньях, невозможно ).
Как было показано выше
скорость относительного скольжения в точке контакта равна
![]() ,
,
где lKP
- расстояние от контактной точки до полюса относительного вращения. Так как VK2K1
перпендикулярна lKP
>, а VK2K1 должна лежать на
касательной, то lKP
является нормалью к профилям в точке контакта. То есть контактная
нормаль к профилям в высшей паре пересекает линию центров в полюсе
относительного вращения.
Основная теорема зацепления.
Формулировка анализа. Контактная нормаль к профилям высшей пары
пересекает линию центров в полюсе относительного вращения звеньев ( то что полюс делит линию центров на отрезки обратно пропроциональные угловым скоростям было доказано выше ).
Формулировка синтеза. Профили в высшей кинематической паре должны быть
выполнены так, чтобы контактная нормаль к ним проходила через полюс
относительного вращения звеньев.
Так как положение полюса на линии центров
определяет передаточное отношение механизма, то профили
удовлетворяющие основной теореме зацепления обеспечивают заданный закон
изменения передаточного отношения или являются сопряженными.
Скорость скольжения в высшей КП или перовое следствие основной теоремы зацепления.
Скорость скольжения
профилей в высшей КП равна произведению скорости относительного вращения на
расстояние от контактной точки до полюса зацепления.
![]()
где верхний знак относится
к внешнему зацеплению, нижний - к внутреннему. Зацепление считается внешним, если полюс делит линию
центров внутренним образом и направления угловых скоростей звеньев
противоположны, и внутренним, если полюс делит линию центров внешним образом
(Рис. 17.8) и направления угловых скоростей одинаковы.
|
|
Из формулы видно, что скорость скольжения во
внутреннем зацеплении много меньше, чем во внешнем.
Определение центра вращения ведущего звена или второе следствие основной теоремы зацепления.
Из схемы, изображенной на рис. 11.7, видно,
что

т.е. отрезок lKD
, отсекаемый от луча, проведенного из точки О2 через точку K, прямой
параллельной контактной нормали, равен передаточной функции точки K2.
Второе следствие основной теоремы
зацепления.
Формулировка синтеза. Если на продолжении луча, проведенного из точки О2 через точку K, отложить от точки K отрезок длиной
lKD = VK2
/ w1 = VqK2 и через конец этого отрезка провести прямую
параллельную контактной нормали, то эта прямая пройдет через центр вращения
ведущего звена точку О1 .
С использованием этого свойства механизма с
высшей парой при проектировании кулачковых механизмов определяют радиус
начальной шайбы по допустимому углу давления.
Формулировка анализа. Луч проведенный через центр вращения ведущего
звена точку О2 параллельно контактной
нормали, отсекает на луче проведенном из точки О2 через точку K
отрезок lKD = VK2
/ w1 = VqK2 , равный
передаточной функции точки K2.
Угол давления в высшей паре ( на примере плоского кулачкового механизма ).
Рассмотрим плоский кулачковый механизм с
поступательно движущимся роликовым толкателем ( Рис.
11.9). Из D BPF
![]()
где
|
|

Подставляя эти выражения в формулу для
тангенса угла давления, получим
|
|
где знак - соответствует смещению оси
толкателя (эксцентриситету) вправо от центра вращения кулачка.
|
|
|
Рис. 11.9 |
Формула Эйлера - Савари.
При синтезе плоских зацеплений широко
применяется формула Эйлера-Савари, которая
устанавливает связь между радиусами кривизны центроид
и радиусами кривизны профилей высшей пары. Эта формула записывается так
![]()
где rw1 и rw2 -
радиусы кривизны центроид первого и второго звена в
полюсе зацепления, ρ1 и ρ2 - радиусы
кривизны профилей в контактной точке, lKP
- расстояние от полюса зацепления до контактной точки, φ
- угол между контактными нормалями к профилям и центроидам.
Теорема Оливье.
Теорема Оливье является основополагающей теоремой как для плоских, так и для пространственных
зацеплений. Она устанавливает основные признаки
определяющие свойства зацепляющихся поверхностей, вид их контакта друг с
другом.
Теорема Оливье. Пусть F1 , F2 и B
некоторые поверхности с определенным абсолютным движением. И пусть F1
и F2 огибающие к B в их относительном
движении, где - мгновенные контактные линии. Если K1 -K1 и
K2 -K2 имеют общие точки, то поверхности F1
и F2 :
- находятся в точечном контакте, если K1 -K1 и K2 -K2 пересекаются в некоторой точке K;
- находятся в линейном контакте, если K1 -K1 и K2 -K2 сливаюся в одну линию, образуя K -K.
|
|
|
Рис. 11.10 |
Теорема Оливье имеет три важных следствия:
Следствие 1. Если оба зубчатых колеса обработаны друг другом, т.е.
первое колесо обработано инструментом режущие кромки
которого копируют второе колесо, а второое -
инструментом режущие кромки которого копируют первое, то эти колеса имеют взаимоогибаемые поверхности зубьев с линейным контактом
поверхностей.
Следствие 2. Если оба колеса обработаны инструментами, образующими
между собой конгруентную пару, то эти колеса имеют взаимоогибаемые поверхности зубьев с линейным контактом
поверхностей.
Следствие 3. Если поверхность зацепления И1
инструмента 1 с колесам 1 и поверхность зацепления И2 инструмента
2 с колесам 2 совпадает с поверхностью зацепления колес 1 и 2, то зубья колес
обработанных при таком условии будут иметь линейный контакт.
§ 4. Зубчатые передачи и их классификация.
Зубчатыми передачами называются механизмы с высшими кинематическими парами в состав которых входят зубчатые колеса, рейки или
секторы - звенья, снабженные профилироваными
выступами или зубьями. Зубчатые передачи бывают простые и сложные. Простая
зубчатая передача - трехзвенные механизм, состоящий из двух зубчатых колес и
стойки, в котором зубчатые колеса образуют между собой высшую пару, со стойкой
- низшие ( поступательные или вращательные ).
Простые зубчатые передачи классифицируются:
- по виду передаточной функции (отношения)
- с постоянным передаточным отношением;
- с переменным передаточным отношением;
- по расположению осей в пространстве
- с параллельными осями;
- с пересекающимися осями;
- с перекрещивающимися осями;
- по форме профиля зуба
- эвольвентным профилем;
- с циклоидальным профилем;
- с круговым профилем (передачи Новикова);
- по форме линии зуба
- с прямым зубом;
- косозубые;
- шевронные;
- с круговым зубом;
- по форме начальных поверхностей
- цилиндрические;
- коническое;
- гиперболоидные;
- по форме и виду зубчатых колес
- червячные;
- с некруглыми колесами;
- винтовые.
§ 5. Эвольвентная зубчатая
передача. Эвольвента
окружности и ее свойства.
Эвольвентная зубчатая передача - цилиндрическая зубчатая передача, профили зубьев которой выполнены по
эвольвенте окружности.
Эволютой называется геометрическое место центров кривизны данной кривой. Данная
кривая по отношению к эволюте называется эвольвентой. Согласно
определению нормаль к эвольвенте ( на которой лежит
центр кривизны ) является касательной к эволюте. Эвольвенты окружности
описываются точками производящей прямой при ее перекатывании по окружности,
которую называют основной.
Свойства эвольвенты окружности:
Форма эвольвенты окружности определяется
только радиусом основной окружности rb.
При rb → ∞
эвольвента переходит в прямую линию.
Производящая прямая является нормалью к эвольвенте в
рассматриваемой произвольной точке My.
Отрезок нормали в произвольной точке эвольвенты lMyN
= r равен радиусу ее кривизны и является касательной к
основной окружности.
Эвольвента имеет две ветви и точку возврата М0, лежащую на основной окружности.
Эвольвента не имеет точек внутри основной окружности.
Точки связанные с производящей прямой но не лежащие на ней
при перекатывании описывают: точки расположенные выше производящей прямой W
- укороченные эвольвенты, точки, расположенные ниже производящей прямой L
- удлиненные эвольвенты.
|
|
|
Рис.11.1 |
Параметрические уравнения эвольвенты получим
из схемы, изображенной на рис. 11.11 . Так как производящая прямая перекатывается по основной окружности без скольжения то дуга М0N
равна отрезку NMy
. Для дуги окружности
![]()
из треугольника D OMyN
Откуда
получим параметрические уравнения эвольвенты.
§ 6. Эвольвентное зацепление и его
свойства.
В зубчатой передаче контактирующие элементы
двух профилей выполняются по эвольвентам окружности и образуют, так называемое эвольвентное зацепление. Это зацепление обладает рядом
полезных свойств, которые и определяют широкое распространение эвольвентных зубчатых передач в современном машиностроении.
Рассмотрим эти свойства.
|
|
|
Рис. 11.12 |
Свойство 1. Передаточное отношение эвольвентного
зацепления определяется только отношением радиусов основных окружностей и
является величиной постоянной.
![]()
Свойство 2. При изменении межосевого расстояния в эвольвентном зацеплении его передаточное отношение не
изменяется.

Свойство 3. При изменении межосевого расстояния в эаольвентном зацеплении величина произведения межосевого
расстояния на косинус угла зацепления не изменяется.
Свойство
4. За пределами отрезка линии
зацепления N1N2
рассматриваемые ветви эвольвент не имеют общей нормали, т. е. профили выполненные по этим кривым будут не касаться, а
пересекаться. Это явление называется интерференцией эвольвент или
заклиниванием.
Вопросы для самопроверки
- Что называется высшей кинематической парой ?
- Какие механизмы с высшими парами вы можете назвать ?
- Как записывается условие существования высшей кинематической пары ?
- Дайте определение основной теоремы плоского зацепления ?
- Что называют линией зацепления ?
- По какой формуле можно определить скорость скольжения во внешнем зацеплении?
- Что называется эвольвентной зубчатой передачей ? Сформулируйте основные свойства и запишите параметрические уравнения описывающие ее ?
- Изменяется ли передаточное отношение в эвольвентном
зацеплении при изменении ![]() ?
?
- Сформулируйте
основной закон зацепления.
- В каком случае профили, участвующие в зацеплении, называют
сопряженными?
- Определите понятия «линия зацепления» и «полюс зацепления»?
- Как определить положение границ активной линии зацепления?
- Что такое эвольвента окружности? Определите понятия: основная
окружность, угол профиля, угол развернутости и инволюта угла профиля.
- Докажите, опираясь на основной закон зацепления, взаимную
сопряженность двух эвольвент.
- Почему кинематика эвольвентного
зацепления нечувствительна к изменению межосевого расстояния?
- Определите понятия «смещение исходного контура» и «коэффициент
смещения»?
- Что такое «коэффициент наименьшего смещения»?
- В каких случаях зубья колеса считают подрезанными? Заостренными?
- Охарактеризуйте интерференцию зубьев в зацеплении.
- Перечислите виды проверок геометрических показателей качества
зацепления.
- Для чего используют измерительные размеры? Виды измерительных
размеров.
Задачи для самостоятельного решения
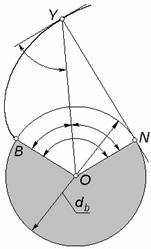
Задача 1
Для текущей
точки эвольвенты Y, расположенной на окружности
радиуса ![]() , задан угол развернутости
, задан угол развернутости ![]() . Полагая диаметр основной окружности
. Полагая диаметр основной окружности ![]() известным, определить
известным, определить ![]() ,
, ![]() ,
, ![]() ,
, ![]() ; написать расчетные формулы в нужной последовательности,
указать названия всех перечисленных величин и обозначить их на эскизе.
; написать расчетные формулы в нужной последовательности,
указать названия всех перечисленных величин и обозначить их на эскизе.
Задача 2 (см. рисунок к задаче 1)
Для текущей
точки эвольвенты Y, расположенной на окружности
радиуса ![]() , задан радиус кривизны профиля
, задан радиус кривизны профиля ![]() . Полагая
. Полагая ![]() известным, определить диаметр основной окружности
известным, определить диаметр основной окружности ![]() и углы
и углы ![]() ,
, ![]() ,
, ![]() ; написать расчетные формулы в нужной последовательности,
указать названия всех перечисленных величин и обозначить их на эскизе.
; написать расчетные формулы в нужной последовательности,
указать названия всех перечисленных величин и обозначить их на эскизе.
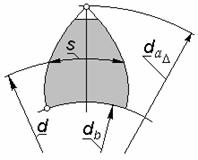
Задача 3
У эвольвентного зубчатого колеса известны диаметры d, ![]() и
и ![]() . Найти толщину зуба колеса s по дуге
делительной окружности; написать все требуемые формулы в порядке их
использования, привести названия всех заданных и вычисляемых величин.
. Найти толщину зуба колеса s по дуге
делительной окружности; написать все требуемые формулы в порядке их
использования, привести названия всех заданных и вычисляемых величин.
Задача 4
В точке A эвольвенты, расположенной на окружности радиуса rA=50 мм, угол профиля равен ![]() . Чему равен угол профиля в точке С той же эвольвенты, если для нее
радиус-вектор rC=70 мм (сделать эскиз)?
. Чему равен угол профиля в точке С той же эвольвенты, если для нее
радиус-вектор rC=70 мм (сделать эскиз)?
Задача 5
В точке Y эвольвенты, расположенной на окружности радиуса ![]() =50 мм, угол
развернутости равен
=50 мм, угол
развернутости равен ![]() . Чему
равен угол развернутости
. Чему
равен угол развернутости ![]() в точке C той же эвольвенты, если для нее
радиус-вектор rC=70 мм (сделать эскиз)?
в точке C той же эвольвенты, если для нее
радиус-вектор rC=70 мм (сделать эскиз)?
Задача 6
В точке Y эвольвенты, расположенной на окружности радиуса ![]() =50 мм, угол
развернутости равен
=50 мм, угол
развернутости равен ![]() . Определить диаметр
. Определить диаметр ![]() основной окружности
эвольвенты (сделать эскиз).
основной окружности
эвольвенты (сделать эскиз).
Задача 7
Радиус
кривизны эвольвенты в некоторой ее точке Y равен
![]() =30 мм, а угол
развернутости –
=30 мм, а угол
развернутости – ![]() =0.5
рад. Определить диаметр
=0.5
рад. Определить диаметр ![]() основной окружности
эвольвенты и угол профиля в точке Y (сделать эскиз).
основной окружности
эвольвенты и угол профиля в точке Y (сделать эскиз).
Задача 8
Найти значение угла профиля ![]() (в градусах) в точке Y эвольвенты, для которой угол развернутости
(в градусах) в точке Y эвольвенты, для которой угол развернутости ![]() .
.
Задача 9
Для колеса,
нарезанного стандартным реечным инструментом, заданы: модуль m=5 мм; диаметр окружности впадин ![]() =85 мм; диаметр делительной окружности d=100 мм. Определить
делительную толщину зуба s.
=85 мм; диаметр делительной окружности d=100 мм. Определить
делительную толщину зуба s.
Задача 10
Для колеса,
нарезанного стандартным реечным инструментом, заданы: модуль m=5 мм диаметр делительной окружности d=100 мм;
делительная толщина зуба s=8 мм. Определить
диаметр окружности впадин ![]() .
.
Задача 11
Для колеса,
нарезанного стандартным реечным инструментом, заданы: модуль m=5 мм диаметр делительной окружности d=100 мм;
диаметр окружности вершин ![]() =110 мм; делительная толщина зуба s=8 мм. Определить
высоту зуба h.
=110 мм; делительная толщина зуба s=8 мм. Определить
высоту зуба h.
Задача 12
При нарезании зубьев стандартным
реечным инструментом диаметр окружности впадин df
оказался больше расчетного на ![]() =0.50 мм; рассчитать ожидаемое увеличение делительной толщины
зуба
=0.50 мм; рассчитать ожидаемое увеличение делительной толщины
зуба ![]() .
.
Задача 13
У зубчатого
колеса, нарезанного стандартным реечным инструментом, известны: m=5 мм; z=15; ![]() . Определить делительную толщину зуба колеса.
. Определить делительную толщину зуба колеса.
Примечание: при написании
расчетных формул указывать наименование каждой используемой (включая параметры
исходного контура) и вычисляемой величины.
Задача 14
У зубчатого
колеса, нарезанного стандартным реечным инструментом, известны: m=5 мм; z=15; ![]() . Определить диаметр окружности заострения.
. Определить диаметр окружности заострения.
Примечание: при написании
расчетных формул указывать наименование каждой используемой (включая параметры исходного
контура) и вычисляемой величины.
Задача 15
У зубчатого
колеса, нарезанного стандартным реечным инструментом, известны: m=5 мм; z=15; ![]() =93 мм. Определить делительную толщину зуба колеса.
=93 мм. Определить делительную толщину зуба колеса.
Примечание: при написании
расчетных формул указывать наименование каждой используемой (включая параметры
исходного контура) и вычисляемой величины.
Задача 16
Эвольвентное колесо, нарезанное стандартным реечным инструментом,
зацепляется с зубчатой рейкой, имеющей прямолинейный профиль зуба и угол профиля
![]() . Диаметр делительной окружности колеса d=200 мм,
его угловая скорость
. Диаметр делительной окружности колеса d=200 мм,
его угловая скорость ![]() =15 рад/с. Определить скорость перемещения рейки.
=15 рад/с. Определить скорость перемещения рейки.
Задача 17
Эвольвентное колесо, нарезанное стандартным реечным инструментом,
модуль которого m=5 мм, зацепляется с зубчатой рейкой,
имеющей прямолинейный профиль зуба и угол профиля ![]() . Определить шаг зубьев рейки
. Определить шаг зубьев рейки ![]() .
.
Задача 18
В эвольвентной зубчато-реечной передаче
рейку с углом профиля ![]() заменили рейкой с
углом профиля
заменили рейкой с
углом профиля ![]() . Как изменится скорость перемещения рейки вдоль ее начальной
прямой при сохранении прежнего значения угловой скорости колеса – уменьшится
или возрастет (и во сколько раз)?
. Как изменится скорость перемещения рейки вдоль ее начальной
прямой при сохранении прежнего значения угловой скорости колеса – уменьшится
или возрастет (и во сколько раз)?
Задача 19
Зубчатая пара
спроектирована на основе стандартного исходного контура и имеет параметры:
модуль m=5 мм; числа зубьев z1=20 и z2=30; межосевое расстояние ![]() =130 мм. На сколько миллиметров нужно изменить межосевое расстояние
передачи, чтобы ее угол зацепления увеличился по сравнению с имеющимся
на 1°?
=130 мм. На сколько миллиметров нужно изменить межосевое расстояние
передачи, чтобы ее угол зацепления увеличился по сравнению с имеющимся
на 1°?
Задача 20
Зубчатая пара
спроектирована на основе стандартного исходного контура и имеет параметры:
модуль m=5 мм; числа зубьев z1=20 и z2=30; диаметры вершин ![]() =110 мм и
=110 мм и ![]() =160 мм; межосевое расстояние
=160 мм; межосевое расстояние ![]() =130 мм. Определить коэффициент перекрытия передачи.
=130 мм. Определить коэффициент перекрытия передачи.
Задача 21
С момента
входа в зацепление до момента выхода из него профиль каждого зуба какое-то
время t
участвует в передаче движения. Определить, при каком значении коэффициента
перекрытия передачи ![]() однопарное зацепление
составляет ровно половину этого времени.
однопарное зацепление
составляет ровно половину этого времени.
Задача 22
С момента
входа в зацепление до момента выхода из него профиль каждого зуба какое-то
время t
участвует в передаче движения. Определить, при каком значении коэффициента
перекрытия передачи ![]() одну треть в таком
случае этого времени составляет двупарное зацепление.
одну треть в таком
случае этого времени составляет двупарное зацепление.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика